Maze Navigation Robot
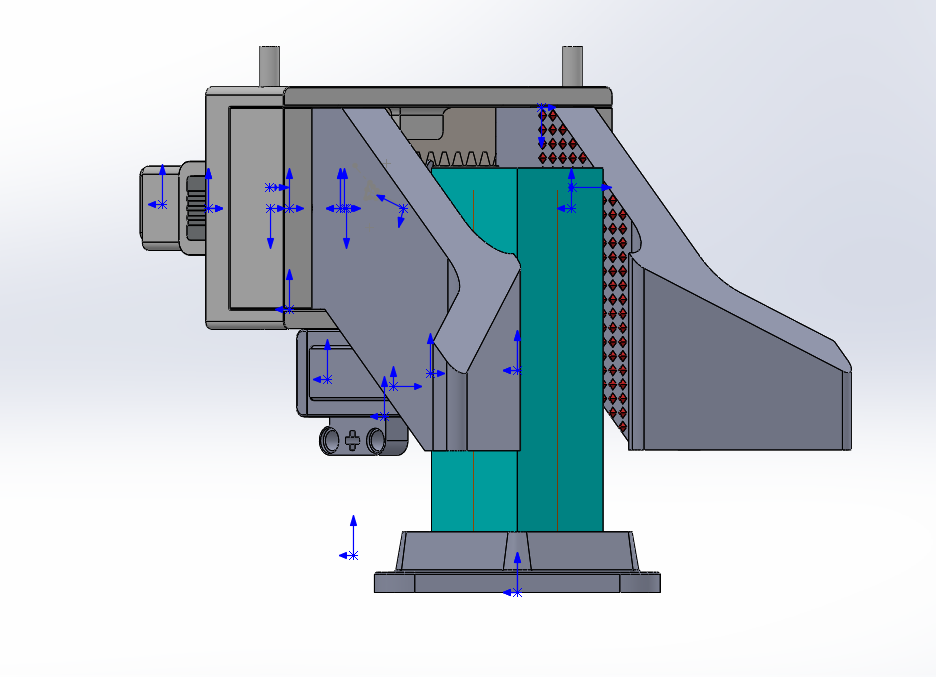
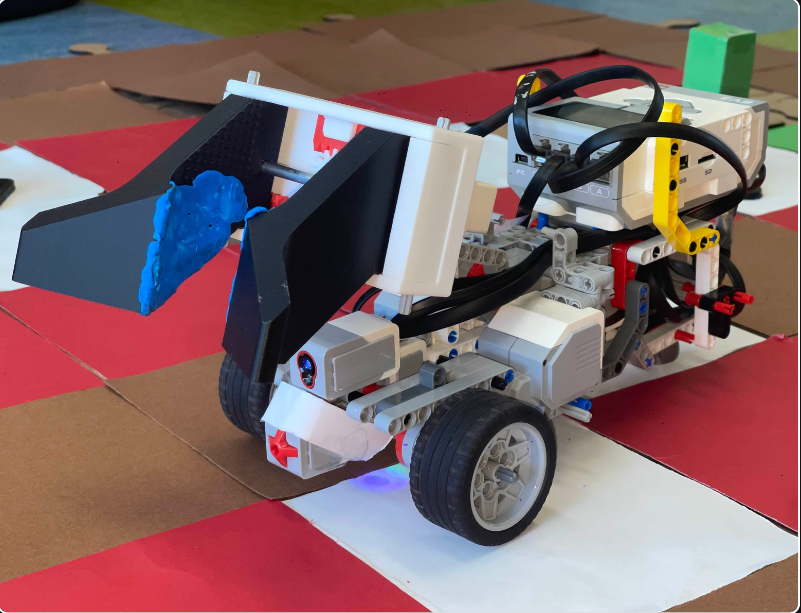
A LEGO Mindstorm-based self-navigating vehicle designed in SolidWorks. The robot features a parallel gripper with a touch sensor for interacting with maze elements and laser-cut maze pieces for a modular testing environment.
Autonomous navigation is powered by a depth-first search (DFS) algorithm written in C, enabling the robot to map and solve unknown mazes with over 60% success rate.
Details
- CAD: SolidWorks
- Platform: LEGO Mindstorm
- End-effector: parallel gripper with touch sensor
- Maze: laser-cut modular pieces
- Algorithm: DFS in C for autonomous mapping
- Result: over 60% maze solving rate