Asymmetrical End-Effector
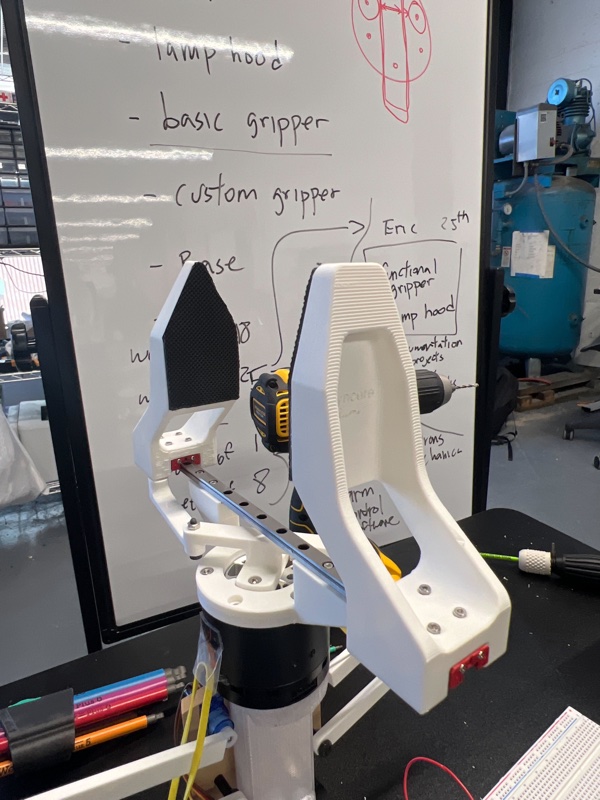
A functional end-effector designed in Fusion360 for robotic laundry folding. The design features an asymmetrical finger geometry to replicate the natural human pinching motion, enabling more reliable fabric grasping.
The mechanism uses a parallel linkage driven by Daimao DC Brushless Motors mounted on a linear guide rail, allowing precise control of grip force and finger positioning.
The end-effector was FDM 3D printed and tested against off-the-shelf grippers, achieving a 20% performance increase in fabric manipulation tasks.

Details
- CAD: Fusion360
- Actuation: Daimao DC Brushless Motors
- Motion: parallel mechanism on linear guide rail
- Fabrication: FDM 3D printing
- Result: 20% performance increase over off-the-shelf grippers